










Stepper motor adalah jenis motor listrik yang banyak digunakan dalam proyek-proyek robotika, CNC, printer 3D dan berbagai aplikasi otomasi industri. Salah satu driver stepper motor yang paling populer adalah A4988, karena harganya terjangkau, mudah dijangkau dan mendukung kontrol presisi.
Apa Itu Modul A4988?
Modul A4988 adalah driver stepper motor berbasis chip Allegro A4988 yang mendukung pengoperasian motor bipolar dengan arus hingga 2A per fase. Fitur utamanya antara lain:
1. Microstepping (1/1 hingga 1/16 step)
Memungkinkan kontrol gerakan motor stepper dengan langkah yang sangat halus dan presisi, cocok untuk aplikasi presisi tinggi seperti robotik atau CNC mini.
2. Proteksi Overcurrent dan Overheating
Modul ini dilengkapi fitur pengaman otomatis untuk mencegah kerusakan akibat arus berlebih dan suhu tinggi. Ini menjadikannya lebih tahan lama dan aman digunakan dalam jangka panjang.
3. Kompatibel dengan Berbagai Mikrokontroler
A4988 dapat dikendalikan menggunakan Arduino, Raspberry Pi, STM32, dan platform mikrokontroler lainnya dengan antarmuka digital (step/dir).
4. Desain Kompak + Heatsink
Modul ini hadir dalam ukuran kecil dan dilengkapi heatsink aluminium untuk membantu membuang panas saat pengoperasian motor dengan beban tinggi.
Modul ini cocok untuk motor seperti NEMA 17 atau motor bipolar lain yang memerlukan kontrol presisi.
Pin dan Fungsi Modul A4988
1. VMOT
Input daya motor (8–35V), digunakan untuk memberi tegangan ke motor stepper.
2. GND (motor)
Ground untuk sirkuit daya motor; penting agar tegangan VMOT memiliki referensi.
3. VDD
Sumber daya logika (3–5.5V), biasanya diambil dari pin 5V Arduino atau mikrokontroler.
4. GND (logika)
Ground untuk bagian logika; harus dihubungkan ke GND mikrokontroler agar sinyal logika valid.
5. STEP
Input pulsa: setiap pulsa HIGH–LOW akan membuat motor melangkah satu langkah.
6. DIR
Input arah: HIGH atau LOW menentukan arah putaran motor (CW atau CCW).
7. ENABLE
Aktif rendah: saat pin ini LOW, driver aktif; jika HIGH, output motor dinonaktifkan.
8. MS1, MS2, MS3
Digunakan untuk mengatur mode microstepping (1, 1/2, 1/4, 1/8, atau 1/16 langkah). Kombinasi HIGH/LOW menentukan resolusinya.
9. RESET
Untuk me-reset chip. Biasanya dihubungkan langsung ke pin SLEEP agar modul tetap aktif secara normal.
10. SLEEP
Mengaktifkan/menonaktifkan chip. Jika pin ini LOW, chip masuk mode hemat daya. Harus dihubungkan ke HIGH agar driver berfungsi.
Pengaturan Microstepping
Microstepping memungkinkan motor bergerak lebih halus dengan membagi step penuh menjadi langkah-langkah kecil. Berikut konfigurasinya:

Cara Menghubungkan A4988 dengan Arduino
1. Komponen yang Dibutuhkan
Untuk membangun rangkaian kontrol motor stepper dengan A4988 dan Arduino, siapkan komponen berikut ini:
- Arduino Uno atau Nano
- Modul driver A4988
- Stepper motor bipolar (misalnya NEMA 17)
- Power supply eksternal 8–12V DC untuk motor
- Kabel jumper
- Potensiometer – untuk mengatur kecepatan (opsional)
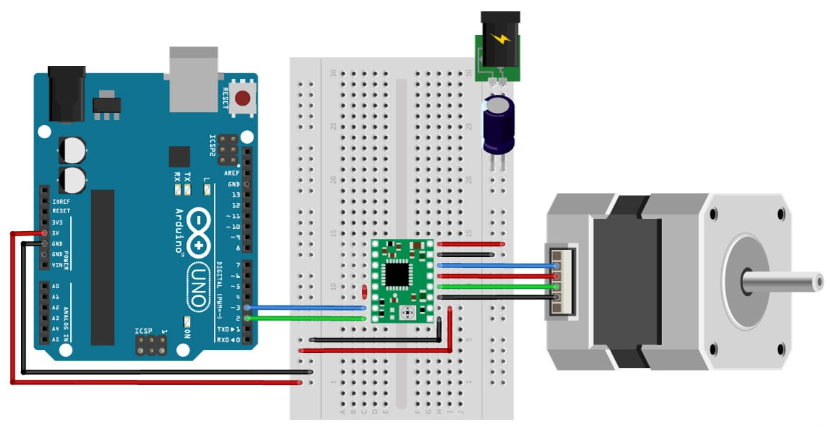
2. Rangkaian Dasar
Hubungkan komponen sebagai berikut:
a. Hubungan A4988 ke Arduino
- STEP → Pin D2 Arduino
Pin ini menerima sinyal pulsa dari Arduino untuk mengatur jumlah langkah motor.
- DIR → Pin D3 Arduino
Digunakan untuk menentukan arah putaran motor (searah atau berlawanan jarum jam).
- ENABLE → GND
Disambungkan langsung ke GND agar driver A4988 selalu aktif.
- VDD → 5V Arduino
Memberi daya logika ke modul A4988 dari Arduino.
- GND (logika) → GND Arduino
Menyamakan ground logika antara A4988 dan Arduino agar sinyal dapat terbaca dengan benar.
b. Hubungan A4988 ke Motor Stepper
- 1A dan 1B → Kumparan 1 motor
Dihubungkan ke salah satu pasangan kabel dari kumparan motor bipolar.
- 2A dan 2B → Kumparan 2 motor
Dihubungkan ke pasangan kabel kumparan lainnya.
c. Hubungan A4988 ke Power Supply Eksternal
- VMOT → +V power supply (8-12V)
Memberikan daya utama ke motor stepper.
- GND (motor) → -V power supply
Ground untuk sirkuit motor; pastikan ini juga terhubung ke GND Arduino untuk referensi bersama.
Tambahan Opsional:
Kapasitor (100uF) dapat dipasang antara VMOT dan GND untuk mencegah lonjakan tegangan yang dapat merusak driver.
3. Contoh Program Arduino
// Pin Arduino
#define STEP_PIN 2
#define DIR_PIN 3
void setup() {
pinMode(STEP_PIN, OUTPUT);
pinMode(DIR_PIN, OUTPUT);
digitalWrite(DIR_PIN, HIGH); // Arah CW
}
void loop() {
digitalWrite(STEP_PIN, HIGH);
delayMicroseconds(500);
digitalWrite(STEP_PIN, LOW);
delayMicroseconds(500);
}
Program ini akan memutar motor searah jarum jam (CW) dengan kecepatan konstan.
Baca juga : Apa Itu NodeMCU dan Bagaimana Bedanya dengan ESP32?
Optimasi Penggunaan A4988
1. Mengatur Arus Motor
A4988 memiliki potensiometer untuk mengatur arus motor (VREF). Gunakan multimeter untuk mengukur tegangan pada potensiometer dan hitung arus dengan rumus:
Contoh: Jika motor membutuhkan 1A, setel VREF ≈ 0.068V.
2. Menggunakan Microstepping
Untuk gerakan lebih halus, aktifkan microstepping dengan mengatur MS1, MS2, MS3:
// Contoh set 1/16 microstepping
digitalWrite(MS1, HIGH);
digitalWrite(MS2, HIGH);
digitalWrite(MS3, HIGH);
3. Kontrol Kecepatan dengan Potensiometer
Tambahkan potensiometer untuk mengatur kecepatan:
int potPin = A0;
int stepDelay;
void loop() {
stepDelay = analogRead(potPin) / 4;
digitalWrite(STEP_PIN, HIGH);
delayMicroseconds(stepDelay);
digitalWrite(STEP_PIN, LOW);
delayMicroseconds(stepDelay);
}
Troubleshooting Masalah Umum
1. Motor Tidak Bergerak
- Periksa koneksi daya VMOT dan VDD.
- Pastikan ENABLE terhubung ke GND.
- Cek apakah STEP dan DIR terhubung dengan benar.
2. Motor Terlalu Panas
- Kurangi arus dengan memutar potensiometer VREF.
- Tambahkan heatsink atau kipas pendingin.
3. Gerakan Tidak Stabil
- Pastikan power supply cukup kuat.
- Gunakan kapasitor decoupling di VMOT.
Aplikasi Modul A4988
- Printer 3D – Mengontrol pergerakan axis X/Y/Z.
- CNC Router – Menggerakkan spindle dengan presisi.
- Robotika – Pergerakan lengan robot.
- Automation – Sistem conveyor dan penggerak linier.
Memahami Prinsip Kerja Stepper Motor dan A4988
Sebelum masuk ke pengaturan lebih lanjut, penting untuk memahami dasar kerja stepper motor dan bagaimana A4988 mengendalikannya.
Jenis Stepper Motor
1. Bipolar
Memiliki 4 kabel dengan dua kumparan independen. A4988 didesain untuk motor jenis ini.
2. Unipolar
Memiliki 5 atau 6 kabel dengan center tap, biasanya memerlukan driver berbeda seperti ULN2003.
Stepper motor bergerak dalam "step" (langkah) berdasarkan pulsa yang diberikan. Setiap step memiliki sudut tertentu (misal 1.8° per step untuk NEMA 17).
Bagaimana A4988 Mengontrol Motor?
- STEP Pin
Setiap pulsa HIGH membuat motor bergerak satu step.
- DIR Pin
Menentukan arah putaran (HIGH = Clockwise, LOW = Counter-Clockwise).
- Microstepping
Memecah step menjadi bagian lebih kecil untuk gerakan lebih halus.
Memilih Power Supply yang Tepat
Kesalahan umum pemula adalah menggunakan power supply tidak memadai, menyebabkan motor tidak stabil atau driver overheating.
Persyaratan Daya untuk A4988
- Daya Motor (VMOT) – 8V-35V, tergantung motor.
- NEMA 17 umumnya memerlukan 12V-24V.
- Arus harus cukup (minimal 1.5x arus motor).
- Daya Logika (VDD) – 3V-5.5V (bisa dari Arduino).
Tips:
- Gunakan power supply terpisah untuk motor dan Arduino agar tidak ada noise.
- Tambahkan kapasitor 100µF di dekat MOT untuk stabilisasi tegangan.
Pengaturan Lebih Lanjut dengan A4988
1. Menggunakan RESET dan SLEEP
- RESET – Jika dihubungkan ke SLEEP, driver selalu aktif.
- SLEEP – Jika diberi LOW, driver masuk mode hemat daya.
Contoh penggunaan:
#define SLEEP_PIN 4
void setup() {
pinMode(SLEEP_PIN, OUTPUT);
digitalWrite(SLEEP_PIN, HIGH); // Aktifkan driver
}
void loop() {
// Putar motor
digitalWrite(SLEEP_PIN, LOW); // Matikan saat tidak digunakan
delay(1000);
digitalWrite(SLEEP_PIN, HIGH); // Hidupkan kembali
}
2. Proteksi Overheating
A4988 memiliki thermal shutdown. Jika terlalu panas, driver mati hingga suhu normal.
Cara mencegah overheating:
- Pastikan VREF tidak terlalu tinggi.
- Tambahkan heatsink atau kipas.
- Hindari beban berlebihan pada motor.
Implementasi Lebih Kompleks: Kontrol Posisi dengan Encoder
Untuk aplikasi presisi seperti CNC, Anda dapat mengkombinasikan A4988 dengan rotary encoder untuk kontrol posisi tertutup.
Rangkaian Tambahan:
- Encoder dihubungkan ke interrupt pin Arduino.
- Program membaca encoder dan menggerakkan motor hingga posisi tercapai.
Pseudocode:
int targetPosition = 1000; // Target 1000 step
int currentPosition = 0;
void loop() {
if (currentPosition < targetPosition) {
digitalWrite(DIR_PIN, HIGH);
digitalWrite(STEP_PIN, HIGH);
delayMicroseconds(500);
digitalWrite(STEP_PIN, LOW);
currentPosition++;
}
}
Aplikasi Real-World: Membuat Mini CNC
Komponen:
- 3x A4988 (untuk sumbu X, Y, Z).
- 3x NEMA 17.
- Arduino + CNC Shield.
Alur Kerja:
1. Arduino menerima perintah G-code dari komputer.
2. Driver menggerakkan motor sesuai koordinat.
3. Microstepping 1/16 meningkatkan akurasi.
Tips:
- Gunakan GRBL firmware untuk kontrol CNC.
- Kalibrasi steps/mm untuk presisi.
Baca juga : Apa Itu Current Sensor ACS712? Cara Menggunakan dan Membacanya
Siap Untuk Membuat Proyek Impianmu Menjadi Kenyataan?
Klik di sini untuk chat langsung via WhatsApp dan dapatkan dukungan langsung dari tim ahli kami!








0 on: "Cara Menggunakan Modul Stepper Motor Driver A4988 untuk Pemula"